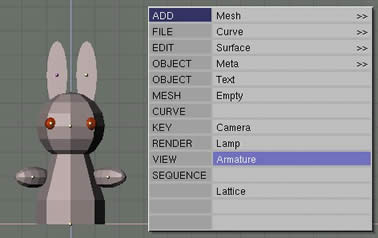
ウサギを例として「骨」の使い方を説明します。
胴、頭、手、目、耳の8個の部品で出来ています。
ふつうのポーズに配置しておきます。
ロボットや動物などの手足を動かす方法
ウサギを例として「骨」の使い方を説明します。 胴、頭、手、目、耳の8個の部品で出来ています。 ふつうのポーズに配置しておきます。 |
|
|
骨を作成するには 図のような形が現れます。 |
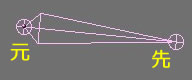 |
移動とクリックで必要な本数だけ作成し、ESCを押して作成を終わります。 (まだEditモードのままです) |
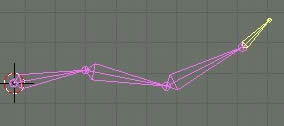 |
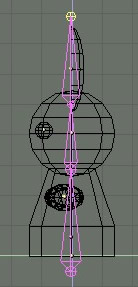
骨の先や間についている○を選択して移動し、図のように配置します。 ○が関節の部分にくるようにします。 両端の○は身体から少しはみ出ているくらいが良い。 いろいろな方向から確認すること。
Tabを押してEditモードを抜けます。 (骨は選択したままです) |
 |
 |
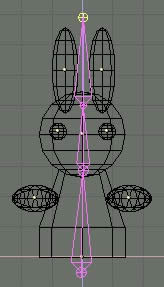
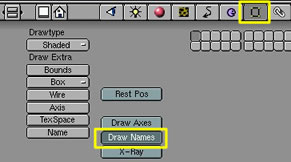
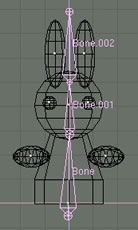
Editボタンを押し、Draw Namesボタンを押します。 骨の名前が表示されます。 作成順に |
 |
 |
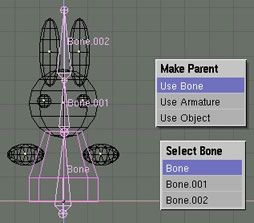
親子関係を設定します。 (1) 部品を1つ選び、Shiftを押したまま骨を右クリックして選択します。 (2) Ctrl+P を押します。 (3) Use Bone を選びます。 (4) 選んだ部品に対応する骨の名前を選びます。 この作業を部品の数だけ繰り返して行います。 |
 |
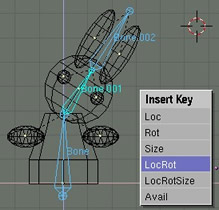
手足などの動きのつけ方 骨を選んでPoseModeボタンを押します。 骨の1本を選んで回転することでポーズが変えられます。 フレーム番号を指定し、 i → LocRot PoseModeボタンを押し、普通の状態にもどします。
|
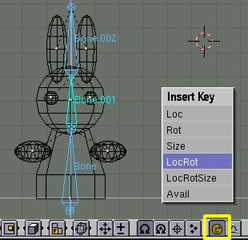 |
骨の1つを回転させると、それより先についている骨と、それらの子供になっている部品がいっしょに動きます。
注意:ウサギの位置や向きを変えるときは、普通の状態で骨を選んでこれまで通りの方法で行います。 |
 |
枝分かれのある骨組みの作り方 ADD、Armatureで骨を作る時に、ひと続きの骨(ここでは胴と頭)ができたところで、ESCを押して作成を終わります。 Editモードのまま、もういちどADD、Armatureを行います。これで別の骨ができます。 これを繰り返して必要な本数の骨を作成し、骨を配置します。
|
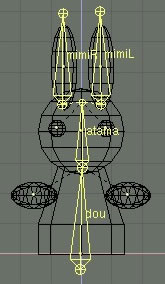 |
Editモードのまま右図のボタンを押し、「a」キーですべてを選択すると右図のように骨の名前が表示されます。 骨の名前のところをShiftクリックして分かりやすい名前に変更しましょう。 その右のchild of の右のボタンを押して親になる骨の名前を選びます。 |
 |
骨と部品の関係づけ、キーフレームの設定方法は上と同様。
|
 |
| IPOウインドウでは全体の移動回転とポーズとは別の表示になります。 |  |
1つの部品でできた物体にポーズをつけることもできます。