 移動と配置
移動と配置
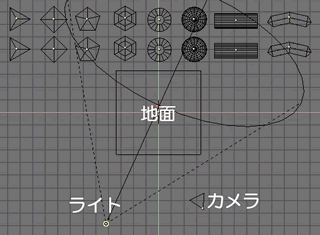
用意されている16個の部品を使って2本足のロボットを組み立てなさい。
(1)部品は16個すべて使用すること。
(2)それ以外の部品を使わないこと。
(3)中央にある厚みのない正方形を地面とし、その上に立てること。
(4)カメラで見たときちょうど良い大きさにすること。
使用ファイル robot1.blend (右クリックして、リンク先を名前を付けて保存)
うまくいかない人は 学内専用サーバより同名のファイルをダウンロードしてみてください。
ビューの調整
トップ/フロント/サイドの切り替え 、ズーム、位置調整、中ボタン、ホーム、面表示
移動
トップビューでは前後左右の移動ができます。
上下の移動を行うにはサイドビュー(またはフロントビュー)を使いましょう。
回転
「r」キーで指示します。他は移動と同じ。
視点により回転軸が変わります。
拡大縮小
「s」キーで指示します。他は移動と同じ。
着色、レンダリングし画像ファイルを exxxxxxc.jpg という名前で提出しなさい。